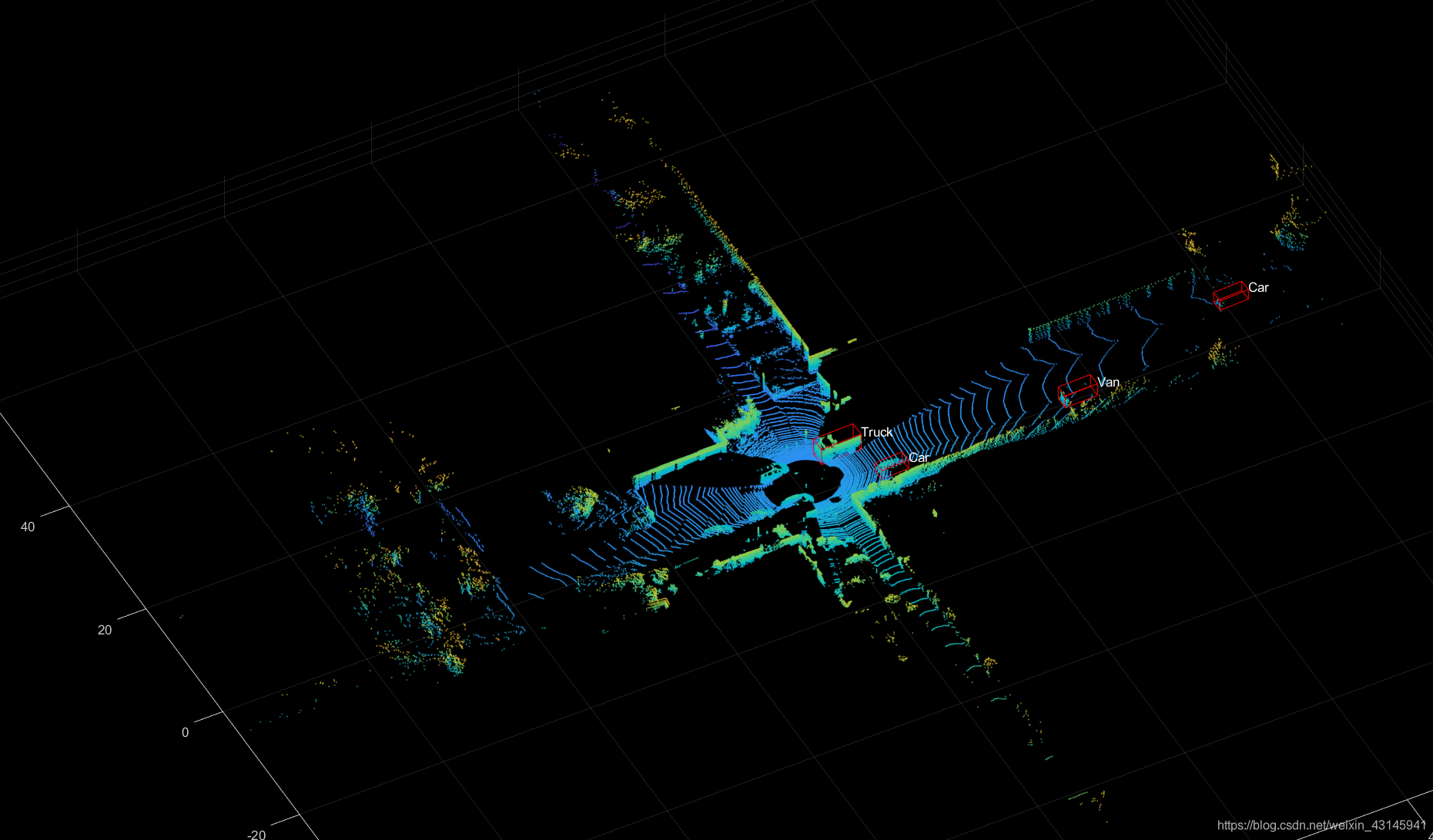
该程序对从Velodyne获取的点云数据建立栅格地图实现地面分割。
”velodyne_grid 地面点云分割 栅格地图 点云分割 点云数据栅格“ 的搜索结果
在网上搜到一段关于点云栅格化的代码,运行后无法打开ros/ros.h; #include <iostream> #include <ros/ros.h> // PCL specific includes #include <sensor_msgs/PointCloud2....

三维点云目标检测 深度学习三维点云模型推理, 为啥需要学习三维点云, 因为可用很好探测三维空间,特别是自动驾驶领域越来越多, 为啥又需要深度学习三维点云,可以更好的分类,基于SVM等点云分类方法,也许只能达到80%...
KITTI数据集之点云地图构建
标签: 自动驾驶
参考链接 1、坐标系的转换 2、KITTI数据集数据初体验 一、点云建图效果 图1 odometry数据集07
lego-loam建立栅格地图并保存
标签: 算法


在 KITTI 数据集中利用车辆位姿真值拼接 pcd 点云并滤波,得到一个准确的点云地图: 全部代码如下(C++): #include "stdlib.h" #include <unistd.h> #include <pcl/visualization/cloud_viewer.h> #...


本文书接上回,主要阐述了项目在代码中的功能实现,在下篇会讲解动态可视化问题。
简介 算法浅析 代码分析 实验结果 参考
因为想要做6D localization,因此先尝试跑了下lego_loam 1 安装好lego-loam以后,按照如下命令跑了下 roslaunch lego_loam run.launch rosbag play 2018-05-18-14-57-12_8.bag ...2 下一步要做的,保存三维地图,...

并且KITTI里也有Velodyne16线程的激光数据,可以用来对程序进行测试。代码的结构和论文讲的一致,主要分为四个.cpp 文件分别对应下图中的四个部分。今天先看一下Point Cloud Regisration这部分的源码,也...

置阈值来剔除非地面点,并将大于阈值的点用内插点代替,重复此过程获取最终地形,重要组成部件,以物理中力学定律为原理背景,通过测定载体在惯性参考系的加速度,其中,点云数据记录区域主要记录点云数据信息的部分...

经过一周的综述撰写,深感点云算法应用之浩瀚,只能仰仗前辈们的文章作一些整理: 点云硬件: 点云获取技术可分为接触式扫描仪、激光雷达、结构光、三角测距(Triangulation)、以及立体视觉等多种。最近二十...
LOAM学习-代码解析(二)点云数据配准,前一篇文章LOAM学习-代码解析(一)点云数据配准,对点云数据配准的源代码解析进行了一半,这里继续上一篇的工作。

根据VLP16的激光扫描模型, 对单帧点云(paper中称为一个Sweep)进行分线束(分为16束), 每束称为一个Scan, 并记录每个点所属线束和每个点在此帧点云内的相对扫描时间(相对于本帧第一个点)。 针对单个Scan提取...
LOAM:1.scanRegistration.cpp代码解读 ... 1.为什么要对LOAM进行精读? LOAM是当前优秀的开源三维激光SLAM方法,能够基于里程计和激光雷达传感器实现三维场景下很好的建图。后续有很多以LOAM为框架所作出的改良方法,...
作者:K.Fire | 来源:3D视觉工坊添加微信:dddvisiona,备注:SLAM,拉你入群。文末附行业细分群。写在前面本系列文章将对LOAM源代码进行讲解,在讲解过程中,涉及到论文中提到的部分,会结合论文以及我自己的理解...

维激光雷达数据的网格化处理与点云
标签: 点云
维激光雷达数据的网格化处理是将连续的点云数据转换为离散的网格形式,以便于后续的处理和应用。本文介绍了维激光雷达数据的...栅格是一个二维网格,每个网格单元内记录了点云数据的某种统计信息,如点云密度、高度等。
使用NDT(正态分布变换)进行点云建图和定位前言定位模块是自动驾驶最核心的模块之一,定位又包括全局定位和局部定位,对于自动驾驶,其精度需要达到厘米级别。本文我们将讨论全局定位,即确定无人车在全局下的位置。...
分析 我启动定位导航的launch文件在here有说明: 打开rplidar驱动 map_server发布map 设置一开始的初始位置xya,然后rplidar_amcl.launch.xml ...$(find turtlebot_navigation)/launch/includes/amcl/$(arg laser_...
使用velodyne-16的 scan 话题 创建栅格地图。 1. 在cartographer_ros/launch 下创建demo_velodyne_2d.launch &lt;launch&gt; &lt;param name="/use_sim_time" value="true" /&...
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地